コンテンツ
ハンドブック全文を入手しましょう
BRÜEL & KJÆR(ブリュエル&ケア)による
振動測定
振動とは何ですか?
物体は、基準位置を中心とした振幅動運動を示す際、それが振動となると言われます。1秒間に完全な動作サイクルが発生する回数は周波数と呼ばれ、ヘルツ(Hz)で測定されます。
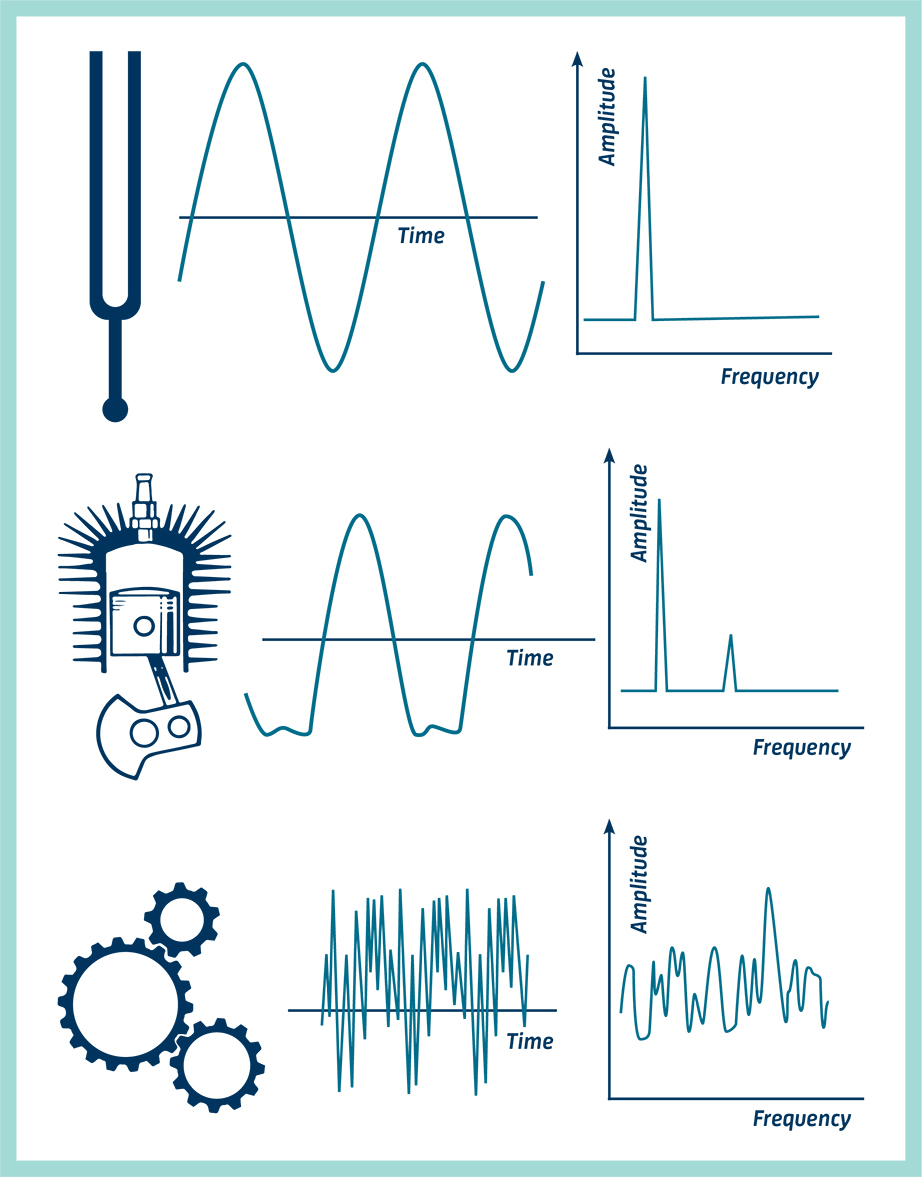
運動は、音叉のように単一の周波数で発生する単一の成分、または、例えば、内燃機関のピストン運動による同時に異なる周波数で発生する複数の成分からなることがあります。
実際の振動信号は通常、同時発生する非常に多数の周波数成分で構成されているため、振幅-時間軸パターン、存在する周波数成分の数、及びそれらが発生する周波数帯を観察するだけでは直ちに確認はできません。
これらの成分は、周波数に対して振動振幅をプロットすることで明確にできます。振動信号を個々の周波数成分に分解することは周波数分析と呼ばれ、診断用振動測定の基礎と見なすことができる手法です。振動レベルを周波数の関数として示すグラフは、周波数スペクトログラムと呼ばれます。
機械の振動を周波数分析する場合、通常、機械のさまざまな部分の基本的な動きに直接関連するいくつかの顕著な周期周波数成分が見つかります。従って、周波数分析により、望ましくない振動の原因を突き止めることができます。
振動はどこから来るのですか?
実際には、振動を避けることは非常に困難です。これは通常、製造公差、クリアランス、機械部品間の転がり接触と摩擦接触、及び回転及び往復運動する構成部分の不均衡な応力の動的影響が原因で発生します。多くの場合、軽微な目立たない振動がその他の複数の構造部品の共振周波数と共振していき、主要な振動及びノイズ発生源にまで増幅される可能性があります。
振動測定
ただし、機械的振動が役立つ場合もあります。例えば、構成部品フィーダー、コンクリートコンパクター、超音波洗浄槽、削岩機、杭打ち機では意図的に振動を発生させます。振動試験機は、物理的または機能的な応答を調査し、振動環境に対する耐性を調査することが要求される状況で、製品及びサブアセンブリに制御されたレベルの振動エネルギーを与えるために広く使用されています。
そのエネルギーを利用する機械の設計か、またはスムーズに動作する機械製品の製作及び保守かに関係なく、すべての振動作業での基本的な要件は、測定及び分析により振動の正確な記述を取得する機能です。
振動レベルの定量化
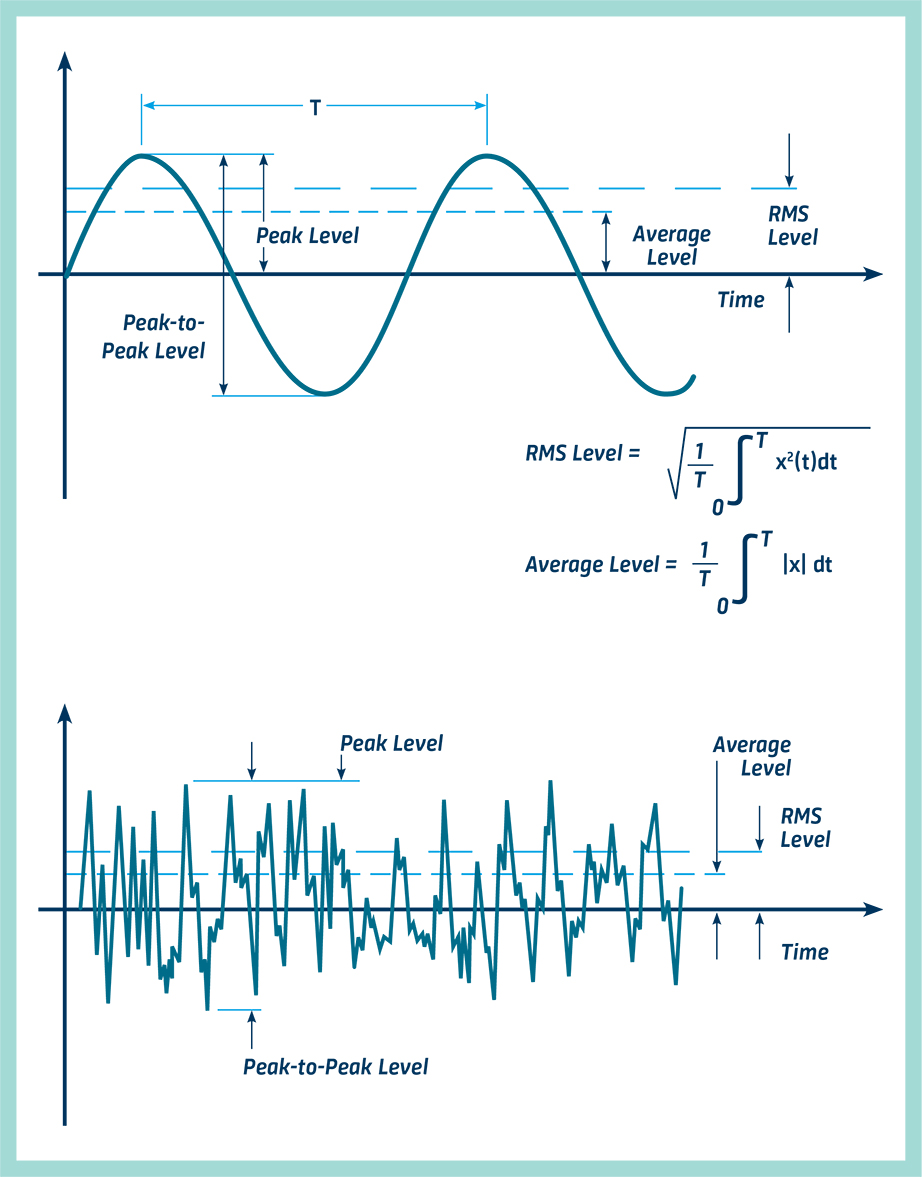
振動の厳しさを表す特性である振動振幅は、いくつかの方法で定量化できます。この図には、正弦波のピークツゥピークレベル、ピークレベル、平均レベル、及びRMSレベルの関係が示されています。
ピークツゥピーク値は、波の最大偏位を示すという点で価値があり、これは、例えば、機械部品の振動変位が最大応力または機械的クリアランスの考慮事項にとって重要である場合に有益な量です。
ピーク値は、短時間のショックなどのレベルを示すのに特に役立ちます。しかし、図から確認できるように、ピーク値は発生した最大レベルを表示するだけであり、波の時間履歴は一切考慮されていません。
一方、修正された平均値は、波の時間履歴を考慮に入れますが、有用な物理量とは直接の関係がないため、実用的な関心は限られていると見なされます。
RMS値は、波の時間履歴を考慮に入れ、エネルギーの内容に直接関連する振幅値を提供し、即ち、その振動についての破壊能力を提供するので、振幅についての最も関連性のある測定です。
加速度、速度、及び変位
測定単位
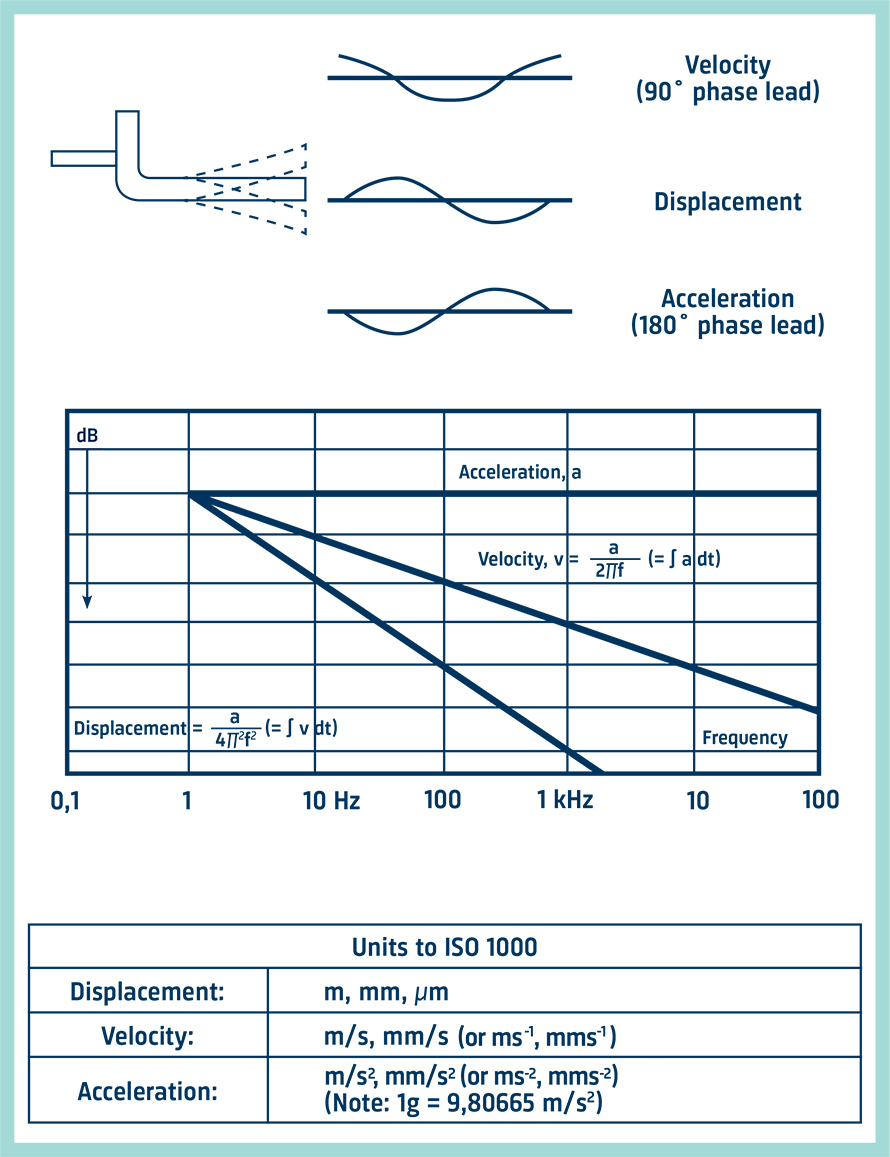
振動する音叉を観察すると、波の振幅を、フォーク部分の物理的な変位が静止位置のいずれかの側で終了していると見なしていました。変位に加えて、速度と加速度の観点からフォークレッグの動きを説明することもできます。考慮されているのが変位、速度、または加速度であるかどうかに関係なく、振動の形式及び周期は同じままです。主な違いは、図に示すように、3つのパラメーターの振幅-時間曲線の間に位相差が存在することです。
正弦波信号の場合、変位、速度、及び加速度の振幅は、周波数と時間の関数により数学的に関連付けられ、これは図にグラフで示されています。時間平均測定を実行する場合は常にそうであるように、位相を無視する場合、その速度レベルは加速度信号を周波数に比例する係数で除算することにより取得でき、その変位は加速度信号を、周波数の2乗に比例する係数「a」因子で除算することによりて取得できます。この分割は、測定機器でデジタル的に実行されます。
各振動パラメーターは、ISO要件に従ってメートル単位でほとんどが普遍的に測定され、表内に記載されています。ただし、重力定数「g」またはより正確には「gn」は、コヒーレント単位のISOシステムの外にありますが、加速レベルには依然として広く使用されています。幸いなことに、ほぼ10の係数(9,80665)が[MOP1]の2つの単位に関連しているため、2%以内を暗算で変換するは簡単なことです。
加速度、速度、または変位パラメーターの選択
振動加速度を検出することにより、そのパラメーターだけに固定されることはありません。加速度信号を速度及び変位に変換できます。殆どの最新振動計は、すべての3パラメーターの測定機能を搭載しています。
単一の広帯域振動測定が行われる場合、信号に多くの周波数の成分を含む場合は、パラメーターの選択が重要です。変位の測定は低周波成分に最も大きな重みを与え、逆に、加速度測定は高周波成分に向かってレベルを重み付けして行きます。
経験によれば、10〜1,000 Hzの範囲で測定された振動速度の全体的なRMS値は、回転機械の振動の重大度を最もよく示しています。考えられる説明は、与えられた速度レベルが与えられたエネルギーレベルに対応するということであり、低周波数及び高周波数の振動は、振動エネルギーの観点から均等に重み付けされます。実際には、多数の機械マシンは適度に平坦な速度スペクトルを持っています。
狭帯域周波数分析を実行すると、パラメーターの選択は、分析がディスプレイまたは印刷物上で傾向を傾斜させて表現する方法でのみ反映されます(反対ページの中央図に実際の表示を示します)。これは、パラメーターの選択に影響を与える可能性のある実践的考慮事項に注意することになります。対象装置のダイナミックレンジ(測定可能な最小値及び最大値の差)を最大限に活用するために、最も平坦な周波数スペクトルを与えるパラメーターを選択することは有利です。このため、速度または加速度パラメーターは通常、周波数分析目的で選択されます。
加速度測定は高周波振動成分に対して重み付けされているため、これらのパラメーターは、目的の周波数範囲が高周波をカバーする場合に使用される傾向があります。
機械システムの性質上、測定可能な変位は低周波数に限定して発生しするため、従って、変位測定は、機械的振動の一般的な調査では限定された価値しかありません。機械構成要素間の小さなクリアランスが考慮されている場合、振動変位はもちろん重要な考慮事項です。バランス調整目的で最も重要な周波数でもあるシャフトの回転周波数で比較的大きな変位が通常発生するために、変位はしばしば回転機械部品の不均衡の1つの指標として利用されます。
次のページに移動
完全なハンドブックをダウンロードする
ダウンロードするにはサインインしてください。
サインアップは無料で、ガイド、入門書、ハンドブック、テクニカルノートなどを備えた当社ナレッジセンターへのフルアクセスを提供します。