JOHN VAUGHAN | BRÜEL & KJÆR
下载PDF
本应用说明将通过几个实例介绍如何平衡旋转机械。直接的方法是通过操作简便的便携式B&K仪器测量以正常工作速度在自己的轴承中运行的旋转部件。
与更为复杂和昂贵的平衡机相比,通过此处所示的布置能实现更优的平衡等级。
什么是静平衡?
基本平衡描述的是可将由旋转物体中不平衡的质量分量引起的主力分解在一个平面中并仅通过在该平面中添加质量以实现平衡的过程。由于对象在静态条件下将达到完全平衡(但在动态条件下则不一定),因此通常称为静平衡。
什么是动平衡?
二次平衡描述的是可将由旋转物体中不平衡的质量分量引起的主力和次要力偶分解为两个(或多个)平面并通过在这些平面中增加质量增量实现平衡的过程。这种不平衡仅在对象旋转时才变得明显,因此该过程通常称为动平衡。动态平衡后,对象将在静态和动态条件下完全平衡。
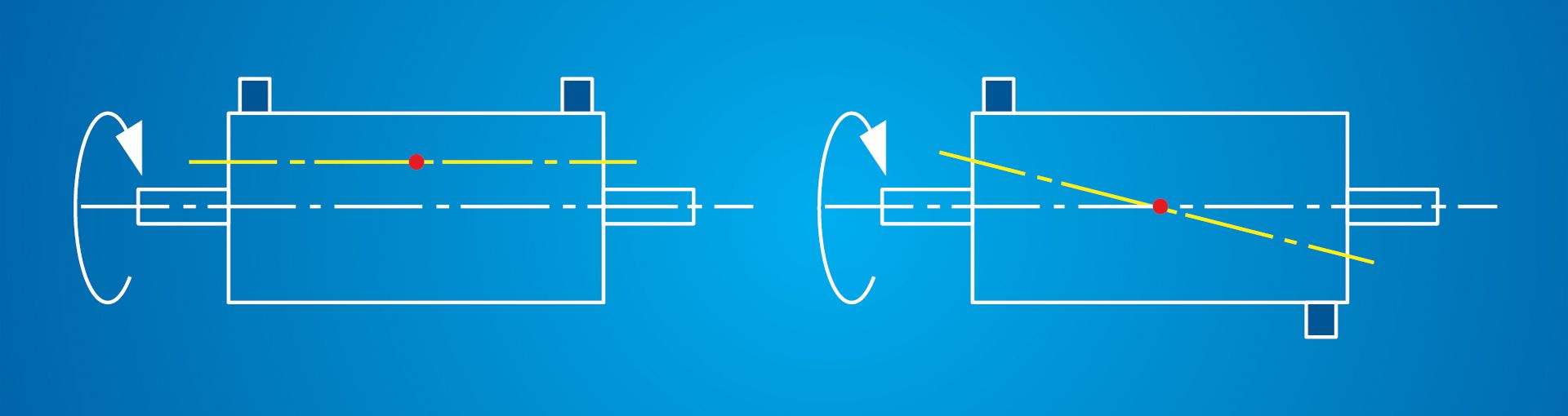
静平衡和动平衡之间的差异如图1所示。可以看出,当转子静止(静态)时,端部质量可能会相互平衡。但在旋转(动态)时不平衡会更强烈。
基础理论
当对象旋转时,它的轴承会产生振动,将该对象定义为“不平衡”。轴承振动是由于不平衡的质量分量与旋转引起的径向加速度相互作用而产生的,它们共同产生离心力。
质量分量旋转时,力也会旋转,并尝试沿力的作用线在其轴承中移动对象。因此,轴承上的任何一点都将承受波动的力。
在实践中,轴承上的力将由主力与次要力组成,主力由轴承平面内或附近的质量分量不平衡引起,次要力则由其他平面上不平衡的偶合分量引起。
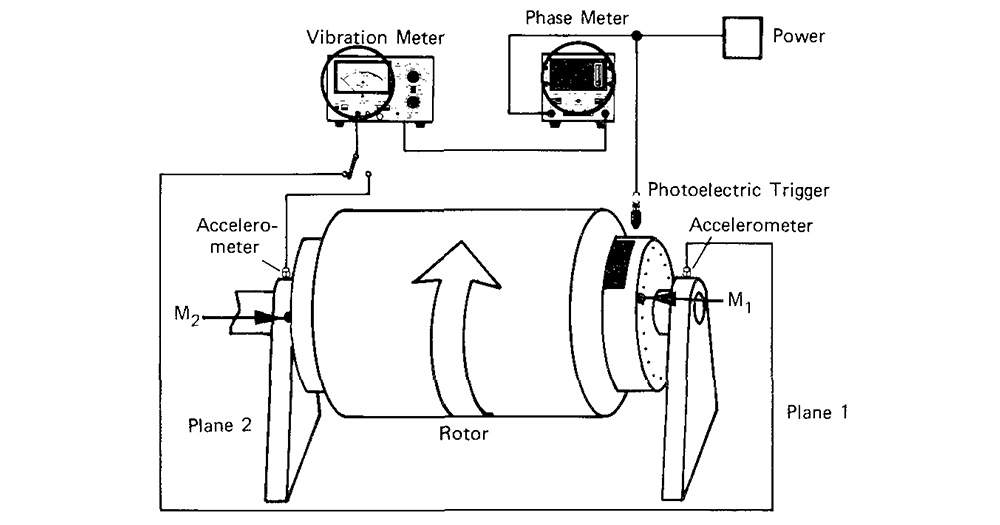
如果将 加速度传感器 安装在轴承箱上,则可以检测到波动的振动力,并将电信号发送到 振动计或分析仪。指示的振动级与不平衡质量的结果成正比。通过将振动计测得的波动信号的相位与从旋转物体上某个基准位置获得的标准周期信号进行比较,可以精确地确定该合力作用的方向(即包含离心力的半径)。
现在可以通过矢量定义轴承的不平衡,其长度由不平衡力的大小(测得的振动级)决定,其角度由力的作用方向决定。此外,如果得到的轴承上的不平衡力可以分解为其主分量(一阶矩)和次分量(二阶矩),则可以平衡对象。
通用测量方法
可以加速度、速度或位移来测量振动级。但是,由于大多数平衡标准都是用振动速度来表示的,因此,传统上会选择速度作为参数。
加速度级的使用将倾向于强调高频分量,而位移则强调低频分量。
相关文章
Download the full handbook
Please sign in to download.
Sign-up is free and gives you full access to our Knowledge Center, with guides, primers and handbooks, technical notes and more.