Contenuti
- Che cos’è la vibrazione?
- Da dove deriva la vibrazione?
- Come quantificare il livello di vibrazione
- I parametri della vibrazione: Accelerazione, velocità e spostamento
OTTIENI IL MANUALE COMPLETO
MISURAZIONE DELLE VIBRAZIONI
di BRÜEL & KJÆR
Che cos’è la vibrazione?
Si dice che un corpo vibra quando effettua un movimento oscillatorio rispetto a una posizione di riferimento. Il numero di volte in cui si ripete un ciclo di movimento completo in un secondo viene definito frequenza e si misura in hertz (Hz).
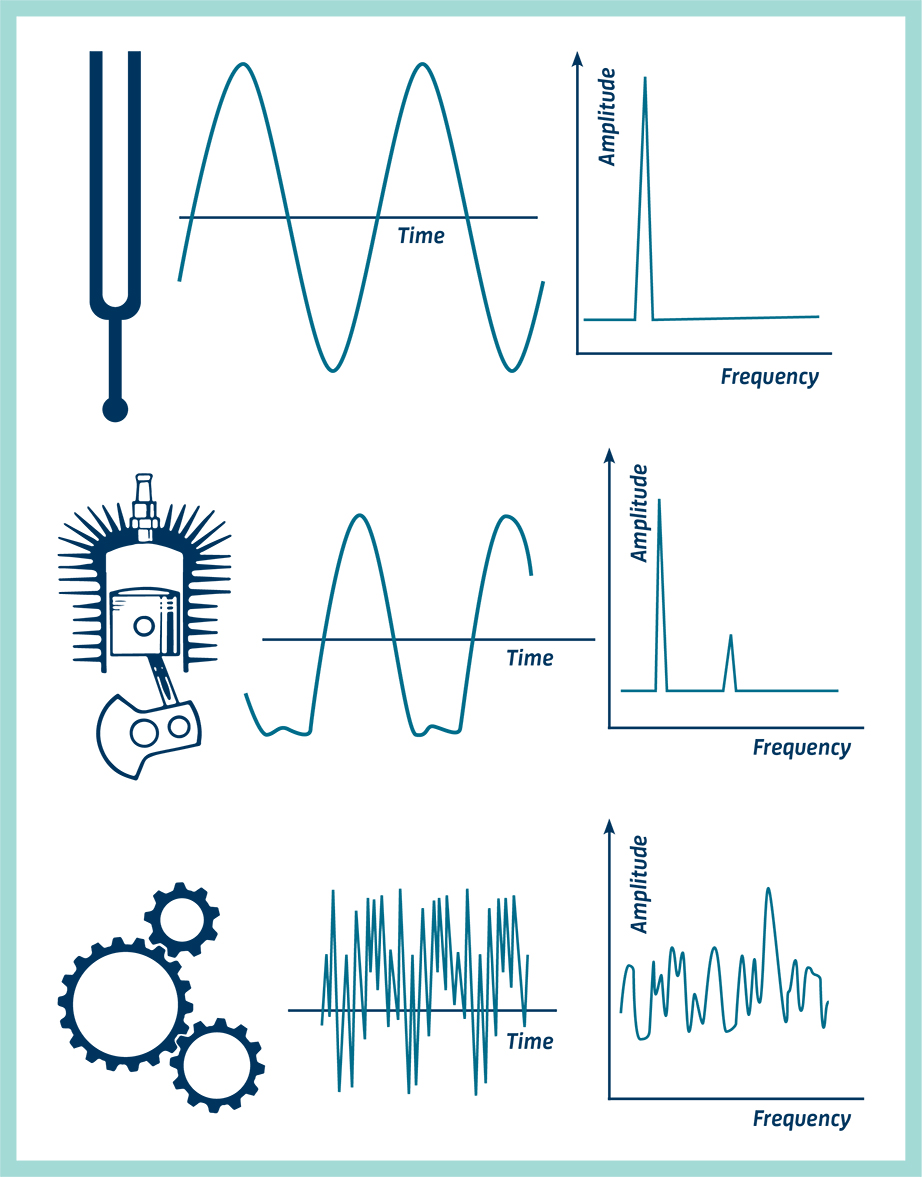
Il movimento può essere quello di un singolo componente a un’unica frequenza, come nel caso di un diapason, o di più componenti a diverse frequenze contemporaneamente, come ad esempio il movimento del pistone in un motore a combustione interna.
I segnali di vibrazione sono di solito costituiti da molte frequenze diverse che si verificano contemporaneamente, quindi non è possibile vedere immediatamente, semplicemente osservando lo schema ampiezza-tempo, quanti componenti sono presenti e le rispettive frequenze.
Per vedere questi componenti è necessario rappresentare in un grafico l’ampiezza della vibrazione rispetto alla frequenza. La suddivisione dei segnali di vibrazione in singoli componenti di frequenza viene definita analisi della frequenza, una tecnica che può essere considerata il fondamento delle misurazioni delle vibrazioni diagnostiche. Il grafico che rappresenta il livello di vibrazione come una funzione di frequenza viene definito spettrogramma di frequenza.
Quando si analizzano le vibrazioni di una macchina in rapporto alla frequenza, solitamente si rilevano molti componenti della frequenza periodici importanti che sono direttamente correlati ai movimenti principali di diverse parti della macchina. Con l’analisi della frequenza, siamo quindi in grado di risalire alla fonte delle vibrazioni indesiderate.
Da dove vengono le vibrazioni?
Nella pratica, è molto difficile evitare le vibrazioni. Di solito esse avvengono a causa degli effetti dinamici delle tolleranze di fabbricazione, dei giochi meccanici, del rollio e del contatto dovuto allo sfregamento tra le parti della macchina e delle forze di sbilanciamento nei componenti rotanti e dei compressori alternativi. Spesso, piccole vibrazioni insignificanti possono eccitare le frequenze di risonanza di alcune altre parti strutturali ed essere amplificate in vibrazioni e sorgenti di rumore più importanti.
MISURAZIONE DELLE VIBRAZIONI
A volte, però, le vibrazioni risultano utili. Ad esempio, le vibrazioni vengono generate intenzionalmente nei trasportatori di componenti, nei compattatori di calcestruzzo, nei bagni a ultrasuoni, nei trapani per roccia e nei battipali. Le macchine per i test vibrazionali vengono ampiamente utilizzate per fornire un livello di energia vibrazionale controllato ai prodotti e ai sottocomponenti dei quali è richiesto di esaminare la risposta fisica o funzionale e verificare la resistenza agli ambienti di vibrazione.
Un requisito fondamentale in qualsiasi operazione che implica vibrazioni, come la progettazione di macchine che ne utilizzano l’energia o la manutenzione di prodotti meccanici che funzionano senza problemi, è la capacità di ottenere una descrizione precisa delle vibrazioni tramite misura e analisi.
Come quantificare il livello di vibrazione
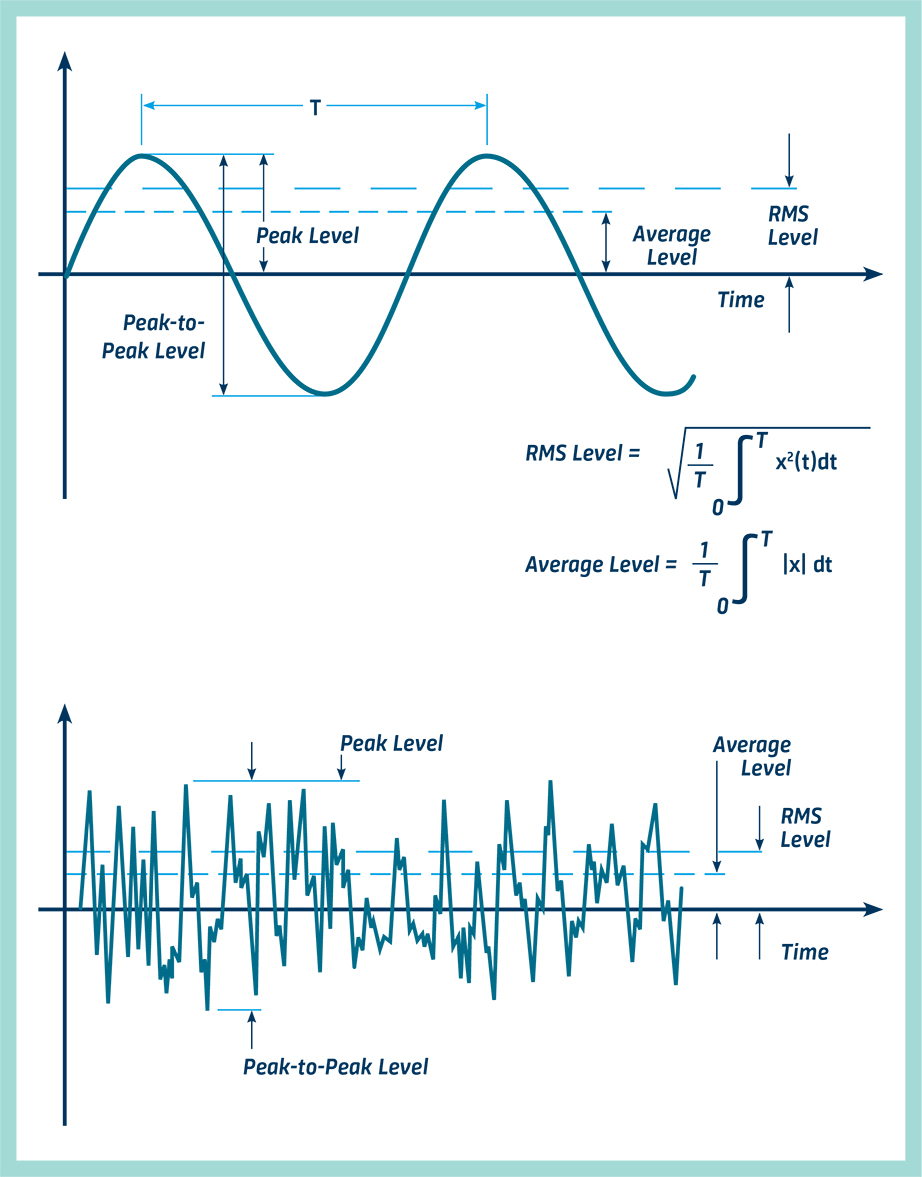
L’ampiezza della vibrazione, che è la caratteristica che descrive l’entità della vibrazione, può essere quantificata in molti modi. Sul grafico, viene mostrato il rapporto tra il livello picco-picco, il livello di picco, il livello medio e il livello RMS di una sinusoide.
Il livello picco-picco è importante in quanto indica l’escursione massima dell’onda, una quantità utile quando, ad esempio, lo spostamento vibratorio di un componente di una macchina è fondamentale per le considerazioni relative al valore massimo di sollecitazioni o giochi meccanici.
Il valore di picco è particolarmente importante per indicare il livello degli urti di breve durata ecc. Ma, come si può vedere dal disegno, i valori di picco indicano solo quale livello massimo si è verificato, senza tenere conto dell'analisi di tipo time history dell’onda.
Il valore medio rettificato, d’altra parte, tiene in considerazione l’analisi di tipo time history dell’onda, ma viene considerato poco interessante dal punto di vista pratico perché non ha un rapporto diretto con nessuna grandezza fisica utile.
Il valore RMS è la misura dell’ampiezza più importante perché tiene in considerazione l’analisi di tipo time history dell’onda e allo stesso tempo indica un valore di ampiezza direttamente correlato al contenuto di energia e quindi alle capacità distruttive della vibrazione.
Accelerazione, velocità e spostamento
Unità di misura
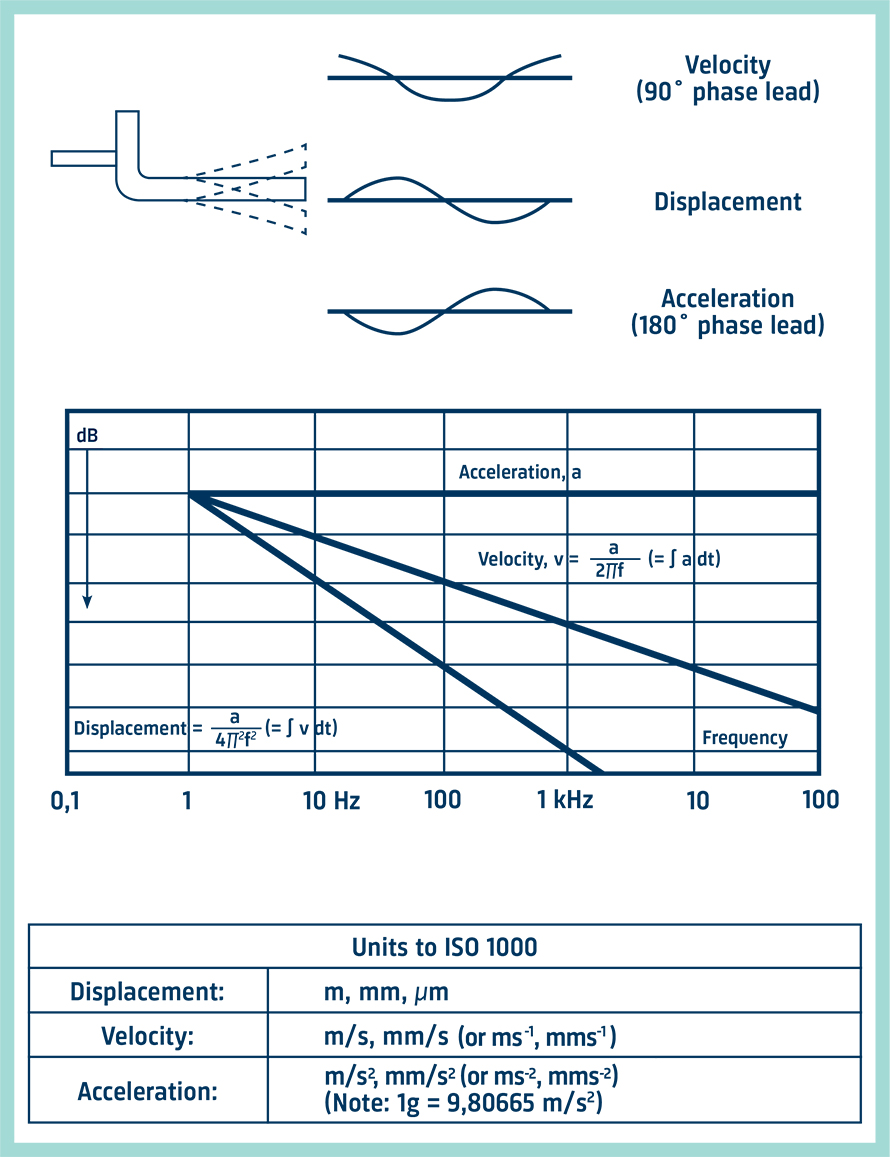
Quando abbiamo considerato il diapason, abbiamo preso in considerazione l’ampiezza dell’onda come spostamento fisico delle estremità dello strumento nelle due direzioni opposte alla posizione di riposo. Oltre allo spostamento, possiamo anche descrivere il movimento del rebbio in termini di velocità e accelerazione. La forma e il periodo della vibrazione rimangono gli stessi per tutti i valori di spostamento, velocità o accelerazione considerati. La differenza principale consiste nel fatto che esiste una differenza di fase tra le curve ampiezza-tempo dei tre parametri come indicato nel disegno.
Per i segnali sinusoidali, le ampiezze di spostamento, velocità e accelerazione sono correlate dal punto di vista matematico da una funzione di frequenza e tempo indicata nel grafico. Se la fase viene trascurata, come avviene sempre quando si fanno misurazioni tempo-media, il livello di velocità può essere ottenuto dividendo il segnale di accelerazione per un fattore proporzionale alla frequenza e lo spostamento può essere ottenuto dividendo il segnale di accelerazione per un fattore proporzionale al quadrato della frequenza. Questa divisione viene eseguita digitalmente negli strumenti di misura.
I parametri di vibrazione sono quasi universalmente misurati in unità metriche in accordo ai requisiti ISO indicati in tabella. Tuttavia, la costante gravitazionale "g" o più correttamente "gn" è ancora ampiamente utilizzata per i livelli di accelerazione nonostante non sia inclusa nel sistema ISO di unità coerenti. Fortunatamente, le due unità [MOP1] sono legate da un fattore di circa 10 (9,80665), quindi è facile calcolare a mente la conversione entro il 2% del valore corretto.
Come scegliere i parametri di accelerazione, velocità o spostamento
Quando rileviamo l’accelerazione di vibrazione, non siamo legati solo a quel parametro. Il segnale di accelerazione può essere convertito in velocità e spostamento. I misuratori di vibrazioni più moderni sono attrezzati in modo tale da poter misurare tutti e tre i parametri.
Quando si esegue una misurazione unica con un’ampia banda di frequenza, la scelta del parametro è importante se il segnale ha componenti a più frequenze diverse. La misurazione dello spostamento darà più peso ai componenti a bassa frequenza e, analogamente, la misurazione dell'accelerazione peserà il livello verso i componenti ad alta frequenza.
L’esperienza ha dimostrato che il valore RMS complessivo della velocità di vibrazione misurata su un intervallo di frequenza compreso tra 10 e 1000 Hz dà l’indicazione migliore dell’importanza della vibrazione sulle macchine rotanti. Una possibile spiegazione di questo fatto è che un livello di velocità dato corrisponde a un livello di energia dato, quindi le vibrazioni ad alte e basse frequenze sono pesate in modo equivalente dal punto di vista dell’energia della vibrazione. Nella pratica, molte macchine hanno uno spettro di velocità ragionevolmente piatto.
Quando si esegue un’analisi della frequenza a banda stretta, la scelta del parametro viene riflessa solo nella direzione in cui l’analisi è rivolta sul display o sulla stampa (come dimostrato nel grafico centrale sulla pagina opposta). Ciò porta a una considerazione di carattere pratico che può influenzare la scelta del parametro. Si consiglia di selezionare il parametro con lo spettro di frequenza più piatto, allo scopo di utilizzare al meglio l’intervallo dinamico (la differenza tra i valori più piccoli e più grandi che possono essere misurati) della strumentazione. Per questo motivo, per l’analisi della frequenza si scelgono solitamente il parametro di velocità o di accelerazione.
Dal momento che le misurazioni dell’accelerazione sono pesate in direzione dei componenti di vibrazione ad alta frequenza, questi parametri tendono ad essere utilizzati nei casi in cui l’intervallo di frequenza di interesse copre frequenze alte.
La natura dei sistemi meccanici è tale che solo in caso di basse frequenze si verificano spostamenti degni di nota; per questo, le misurazioni degli spostamenti non hanno particolare importanza nello studio generale delle vibrazioni meccaniche. Nei casi in cui si considerano piccoli giochi meccanici tra gli elementi di una macchina, lo spostamento vibratorio è invece molto importante. Lo spostamento viene spesso utilizzato come indicatore di uno sbilanciamento nei componenti rotanti della macchina perché solitamente gli spostamenti di dimensioni degne di nota si verificano alla frequenza di rotazione dell’albero che è anche la frequenza di maggiore interesse per quanto riguarda il bilanciamento.
VAI ALLA PAGINA SUCCESSIVA
Scarica il manuale completo
Iscriviti per eseguire il download
L’iscrizione è gratuita e ti offre accesso completo al nostro Knowledge Center dove puoi trovare guide, manuali introduttivi e generali, note tecniche e molto altro.