Pratiquement tous les essais de vibrations couvrent une plage de fréquences marquée par des résonances mécaniques au sein d’un système composé d’une charge utile, du dispositif et de son armature. Dès lors, c’est l’accélération qui détermine l’essai, sur la base de l’équation simple suivante à masse constante :
force = masse × accélération (f = ma)
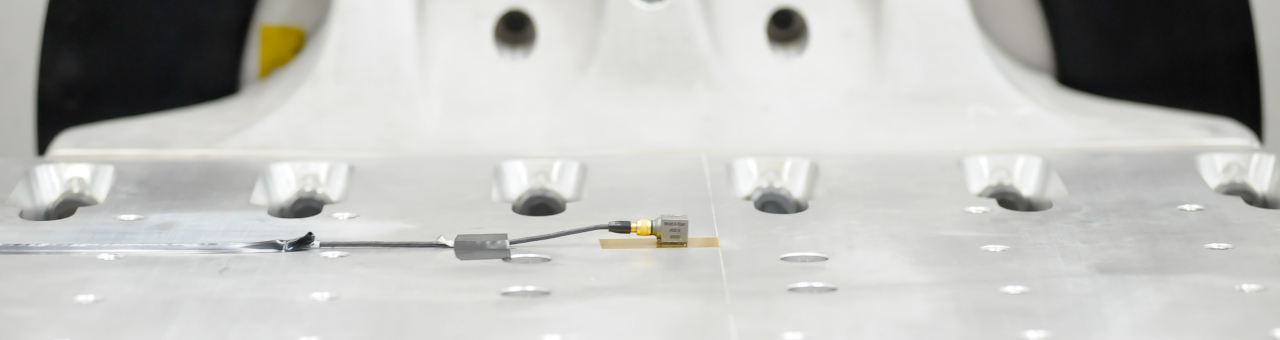
Cependant, en présence de résonances, la masse réelle ne reste pas constante. En conséquence, un mauvais contrôle des vibrations peut entraîner un excédent ou un déficit de charge utile, et des dommages dus à la surstimulation de l’armature. Dès lors, l’un des éléments les plus critiques de tout essai en vibration consiste à bien choisir l’emplacement des accéléromètres de contrôle.
Il n’existe pas d’emplacement universellement admis de contrôle des vibrations actives. Néanmoins, si l’emplacement est mal choisi, cela peut endommager le dispositif de vibrations ou perturber les accélérations appliquées à la charge utile. Il convient de respecter les principes suivants :
- Toutes les structures mécaniques présentent des résonances
- Plus une structure est grande, plus la fréquence de résonance est basse
- Si la masse augmente mais pas la rigidité, la fréquence de résonance baisse
- Si la rigidité augmente mais pas la masse, la fréquence de résonance augmente
- Dans un système ouvert, caractérisé par une résonance purement axiale, les points les plus agités sont toujours les extrémités
Choisir l’emplacement du contrôle
La raison d’être première des accéléromètres de contrôle est de limiter l’accélération dans la charge utile. Si la charge utile est de grande taille et/ou si la plage de fréquences est élevée, une ou plusieurs résonances surviendront forcément un moment donné. Elles se manifestent par la différence des niveaux d’accélération du matériel.
Si un seul accéléromètre est utilisé dans un essai, la boucle de contrôle vérifie l’accélération en ce seul point. Si cet emplacement correspond à un nœud de résonance présentant peu ou pas de mouvement, le reste de la structure pourrait être soumis à une accélération dépassant de plus de cent fois la valeur de contrôle.
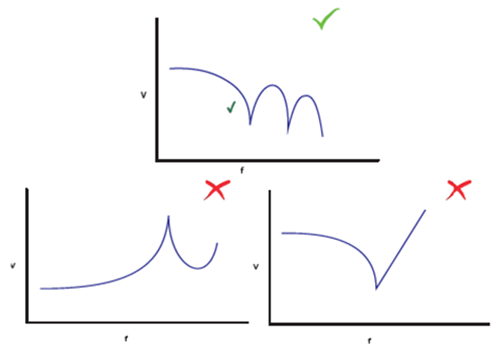
Afin de déterminer si un accéléromètre de contrôle est placé sur un nœud, il faut examiner le signal de stimulation, qui montre la dynamique du système dans son ensemble. Une baisse de la stimulation indique une résonance, et une hausse de la stimulation indique une antirésonance. L’emplacement des contrôles doit être modifié dans le cas d’une antirésonance. L’illustration ci-dessous montre des exemples de bons et de mauvais tracés de stimulation.
Vu que l’emplacement des nœuds varie en fonction de la fréquence, il est difficile de trouver un endroit où aucun nœud ne se produira jamais. C’est pour cette raison qu’il est conseillé de choisir plusieurs emplacements d’accéléromètres. Le meilleur endroit pour placer les accéléromètres, qui présente le moins de risques de nœud, est l’extrémité du système. Si cela est impossible, ajustez les moniteurs par des réglages fins afin d’éviter que le vibrateur soit endommagé.
Test aléatoire vs test sinusoïdal
Le système de contrôle d’un agitateur diffère selon que l’on effectue un test sinusoïdal ou aléatoire.
Test sinusoïdal
L’amplificateur surveille la tension et le courant amenés à l’agitateur et interrompt l’essai si l’une de ces deux valeurs dépasse les points de déclenchement prédéfinis. Dans le cas d’un essai à haut niveau, et si le contrôle se trouve sur un nœud, il est possible que la puissance de stimulation dépasse le point de déclenchement. Résultat : le système s’arrête.
Test aléatoire
L’amplificateur surveille la tension et le courant moyens quadratiques de manière analogue. Si le contrôle se trouve sur un nœud, l’amplificateur ne s’arrêtera pas si la tension et le courant totaux restent en dessous du point de déclenchement. Cela reste vrai même si l’agitateur produit potentiellement plus de force que nécessaire.
Complication supplémentaire : à la fréquence de résonance de l’armature elle-même, on constate une grande quantité d’énergie « libre ». Il ne faut que peu de tension et de courant pour amener l’armature à cette fréquence. L’armature peut dès lors être endommagée par une surexcitation de l’agitateur, sans que l’amplificateur ne s’arrête. Le fait de placer un accéléromètre de contrôle à l’extrémité du système permet de protéger contre ce risque, puisque son mouvement est semblable à celui de l’armature à l’autre extrémité.
Comment appliquer une stratégie de contrôle optimale ?
Respecter les conseils ci-dessous vous permettra de maximiser la durée de vie de votre équipement.
- Fixez toujours un accéléromètre à l’extrémité du système, pour le commander ou pour le surveiller. Définissez les limites de l’accélération théorique maximale à l’aide de la formule f = ma.
- Les grandes tables de glissement peuvent nécessiter le placement de plusieurs accéléromètres de contrôle aux extrémités. En effet, le coin du plateau vibre selon une ampleur différente de celle du centre, et à une fréquence supérieure.
- Afin de caractériser l’équipement et la charge utile, appliquez des balayages sinusoïdaux sur toute la plage de fréquences de l’essai. Si les ondes sinusoïdales sont interdites, vous pouvez appliquer des balayages aléatoires de faible niveau. Par « faible niveau », nous entendons environ –12 dB par rapport à la valeur pleine d’essai.
- Analysez la stimulation pour vous assurer de l’absence d’augmentation au-delà du niveau de stimulation nominal.
- Sur la base des résultats, adaptez votre stratégie de contrôle si nécessaire.
- Dans le cas d’un fonctionnement aléatoire, faites attention à l’énergie située hors de la bande de fréquence. La largeur de bande doit être d’au moins 1,5 fois la fréquence de contrôle la plus élevée.
- Si cette énergie est grande ou si elle est du même niveau que l’énergie contrôlée, il faut investiguer avant de poursuivre.
- Si un problème survient, examinez l’enregistrement de l’accélération en temps réel. Il peut révéler des problèmes qui ne sont pas visibles dans le domaine fréquentiel.
- Si tout va bien, continuez aux valeurs d’essai.
Cela protégera autant que possible l’agitateur de tout dommage. Si vous ne prenez pas ces précautions, l’agitateur sera forcé de générer plus que la force ou l’accélération voulues, ce qui réduira sa durée de vie.
Pour en savoir plus sur les Systèmes d’essai de vibrations LDS et les accéléromètres HBK :
Abonnez-vous à notre Newsletter et recevez les dernières actualités en acoustique et vibrations
Les dernières infos de Brüel & Kjær directement dans votre boîte de réception
Nouveaux produits, remises et offres spéciales
Articles, vidéos et guides consacrés à l'acoustique et aux vibrations