ほぼ全ての振動試験は、ペイロード、取付治具、アーマチュアからなるシステムで機械的共振が発生する周波数範囲を含んでいます。この中で、試験は質量一定条件下で、以下の基本式に基づき、加速度によって制御されます。
力=質量×加速度(f = ma)
しかし、共振状態では有効質量(訳注:実質量ではない)は一定ではありません。そのため、振動制御がうまくいかないと、ペイロードの過小負荷や過大負荷、アーマチュアの過大駆動による破損につながることがあります。制御用加速度ピックアップをどこに配置するかは、振動試験において最重要事項の一つです。
普遍的に最適な振動制御用加速度ピックアップの配置はありません。とはいえ、位置を間違えると、振動装置が壊れたり、ペイロードにかかる加速度に影響が出たりします。したがって、以下の原則を守る必要があります。
- 全ての機械的構造は固有振動数を有しています。
- 構造規模が大きいほど、固有振動数は低くなります。
- 剛性を増加させずに質量を増加させた場合、固有振動数は低下する傾向があります。
- 質量を増加させずに剛性を高くした場合、固有振動数は上昇する傾向があります
- 自由状態の場合、純粋な軸物を共振させて場合、最も振動するのは軸端になります。
制御用加速度ピックアップの配置選択
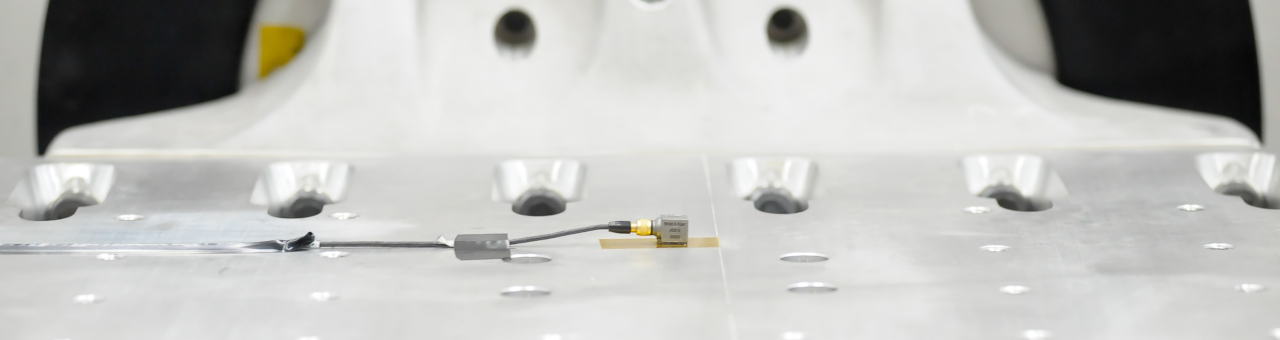
加速度センサを制御に使用する最も明白な理由は、ペイロードへの加速度を制御するためです。ペイロードが大きく、かつ周波数範囲が広いと、いくつかの個所で1つもしくはそれ以上の共振が発生します。これは、取付治具上の加速度レベルの差として確認することができます。
試験で使用する加速度センサの位置が1つだけの場合、制御ループはその位置での加速度制御のみしか保証することができません。もし、この位置が、ほとんど動きのない共振ノード(節)と一致する場合、構造物の他の部分は制御値の100倍以上で加振されるようなことも起きかねません。
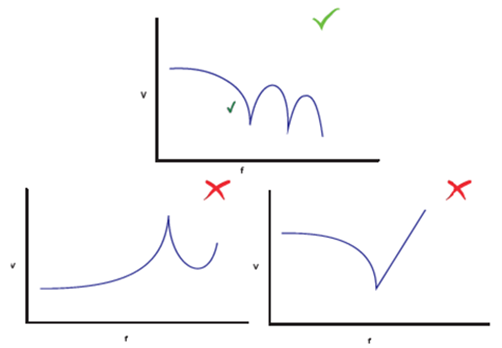
制御用加速度センサがノードに取り付けられているかどうかを判断するには、システムの動特性を示すドライブ用駆動信号を見ると明確になります。ドライブ用駆動信号の減少は共振を示し、増加は反共振を示します。反共振の場合は、制御用加速度センサ配置を変更する必要があります。良いドライブプロットと悪いドライブプロットの例を下図に示します。
ノード位置は周波数に応じて変化するため、ノードの発生しないポイントを見つけることは困難です。このため、複数の加速度センサを使用する必要があります。加速度ピックアップを配置する場所として、ノードにかかる危険性が最も低いのはシステムの末端部です。それができない場合は、加振機が破損しないように過大入力レベルを設定し、モニタする必要があります。
ランダム試験 vs 正弦波試験
正弦波試験とランダム試験では、加振機の制御システムに違いがあります。
正弦波試験
アンプは加振機に供給される電圧と電流を監視し、どちらかがプリセットされたトリップレベルを超えた場合はテストを停止します。ハイレベルテストの場合、制御位置がノードの場合、ドライブの電力がトリップレベルを超えて増加し、システムがシャットダウンすることがあります。
ランダム試験
アンプは、正弦波試験と同様の方法で実効電圧および電流を監視します制御位置がノードの場合でも、電圧と電流がトリップレベル以下のままであれば、アンプはシャットダウンしません。これは、加振器が必要以上の力を発揮していても変わりません。
さらに複雑なのは、アーマーチャ自体の固有振動数では、大量の「自由エネルギー」が存在することです。この周波数でアーマチュアを駆動するために必要な電圧と電流はほとんどありません。アンプをシャットダウンが原因でなくとも、加振機が過大加振することで、アーマチュアが損傷することがあります。システムの端に制御用加速度ピックアップを置くことで、もう一方の端にあるアーマチュアと同じような動きをするので、この危険を回避することが可能になります。
制御戦略のベストプラクティス
以下のような良いプラクティス行うことで、機器の寿命を最大限に延ばすことができます。
- システムの末端には必ず加速度ピックアップを取り付け、制御または監視を行ってください。f = ma の計算を使用して、最大理論加速度に上限値を設定します。
- 大型のスリップテーブルでは、端に配置された複数の制御用加速度ピックアップが必要となる場合があります。プレートの角は、より高い周波数では、中心とは異なるレベルで振動する可能性があります。
- 取付治具とペイロードの特性を確認するために、テスト周波数範囲全体にわたって低レベルの正弦波掃引を実行します。正弦波試験が禁止されている場合、これはローレベルのランダム試験で代用も可能です。ローレベルは、フルテストレベルの約-12dB で行います。
- ドライブ駆動用信号を確認し、公称レベルを超えた上昇がないことを確認します。
- その結果をもとに、必要に応じて制御方法を変更します。
- ランダム動作時は、該当周波数帯域外のエネルギーを確認してください。帯域幅は最高制御周波数の1.5倍以上であることが望ましいです。
- このエネルギーが大きい場合、あるいは制御エネルギーと同レベルの場合は、事前に調査する必要があります。
- 問題が発生した場合は、記録された加速度センサの実波形を確認します。これにより、周波数領域では見えない問題が明らかになることがあります。
- 問題なければ、テストレベルに進みます。
これにより、加振機の損傷を可能な限り防止することができます。これらの注意を怠ると、加振機は意図した以上の力や加速度を与えることを余儀なくされ、その寿命を縮めることになります。
LDS 振動試験システムおよびHBK 加速度ピックアップのご紹介:
当社ニュースレターを購読すると音とバイブレーションの世界からの最新情報を取得できます。
最新のブリュエル・ケアーからのニュースをメールでお届けします。
新製品情報、セールやキャンペーンなどの情報
音響・振動の記事、ビデオや情報