
Der Accelerometer Mounting Check (AMC) – basierend auf einer patentierten Technologie von Brüel & Kjær – bietet eine einfachere und schnellere Möglichkeit, die Montage von Beschleunigungssensoren zu überprüfen und zu verifizieren, dass Ihre Sensoren korrekt montiert sind. Somit sind langwierige visuelle und manuelle Kontrollen nicht länger notwendig. Lassen Sie uns das Ganze detaillierter betrachten.
Die perfekte Montage eines Beschleunigungssensors
Die Theorie hinter der Technologie
Wir modellieren einen an einer Struktur montierten Beschleunigungssensor als Masse-Feder-Dämpfungssystem, wobei ms, mb und mt die seismische Masse des Beschleunigungssensors, die Masse seiner Grundplatte bzw. die dem Prüfobjekt zugeordnete Masse sind (Abb. 1). Die beiden ersten Massen sind durch eine Feder mit der Steifigkeit kPZ verbunden, die das piezoelektrische Element darstellt.

BESCHLEUNIGUNGSSENSOR TYP 4533-S
Abb. 1: Typ 4533-S und Masse-Feder-Dämpfungssystem
Ein Feder-/Dämpfungselement kM wird hinzugefügt, um den Einfluss des Prüfobjekts zu modellieren. Die Massen können sich entlang der vertikalen Achse bewegen, wobei ihre Koordinaten jeweils xs, xbund xt sind. Der einfachste Weg, die Bewegungsgleichungen abzuleiten, ist die Verwendung der Lagrange-Gleichungen.
Zunächst wird die Lagrange-Gleichung L=T-V erstellt, wobei T und V die kinetische bzw. potentielle Energie des Systems darstellen:


Ohne von außen auf das System einwirkende Kräfte und unter Auslassung der Dissipation.
Die Lagrange-Gleichung lautet:

Dabei ist xj eine der Koordinaten xs, xb und xt. Durch Differenzierung erhält man drei Bewegungsgleichungen.
In der Matrix-Notation lauten diese wie folgt:

Oder aber in einem kompakteren Format:

Das System verfügt über drei Freiheitsgrade (DOF), von denen einer die Starrkörperbewegung der Baugruppe darstellt. Gemäß dem AMC-Ansatz wird eine periodische elektrische Ladung an das piezoelektrische Element angelegt, wodurch es sich zusammenzieht und ausdehnt. Dadurch wirken Kräfte (in Abb. 1 durch die grauen Pfeile gekennzeichnet) auf die seismische Masse und die Grundplatte.
Gleichzeitig misst der AMC die Antwort des Beschleunigungssensors, die proportional zur Verformung des piezoelektrischen Elements ist (xs - xb) und berechnet die AMC-Übertragungsfunktion (FRF) zwischen der Antwort und der angelegten Ladung.
Es ist möglich, die AMC-Übertragungsfunktion (FRF) analytisch zu bestimmen. Da die Elemente der Matrix [α(ω)]=([K]-ω2 [M])-1 die Übertragungsfunktionen (FRF) zwischen den entsprechenden Freiheitsgraden (DOF) sind, können die AMC-Übertragungsfunktionen aus den Elementen von [α(ω)] = ([K] - ω2 [M])-1 kombiniert werden.
Abbildung 2 zeigt die für drei wichtige Szenarien berechneten AMC-Übertragungsfunktionen: ein ordnungsgemäß montierter Beschleunigungssensor, ein frei hängender Beschleunigungssensor und der Beschleunigungssensor, der ordnungsgemäß an einer Struktur aus leichtem Material (wie Holz) oder an einer dünnen Metall- oder Kunststoffplatte montiert ist. Durch den Vergleich der gemessenen Kurven ist der AMC in der Lage, die Qualität der Montage zu erkennen.
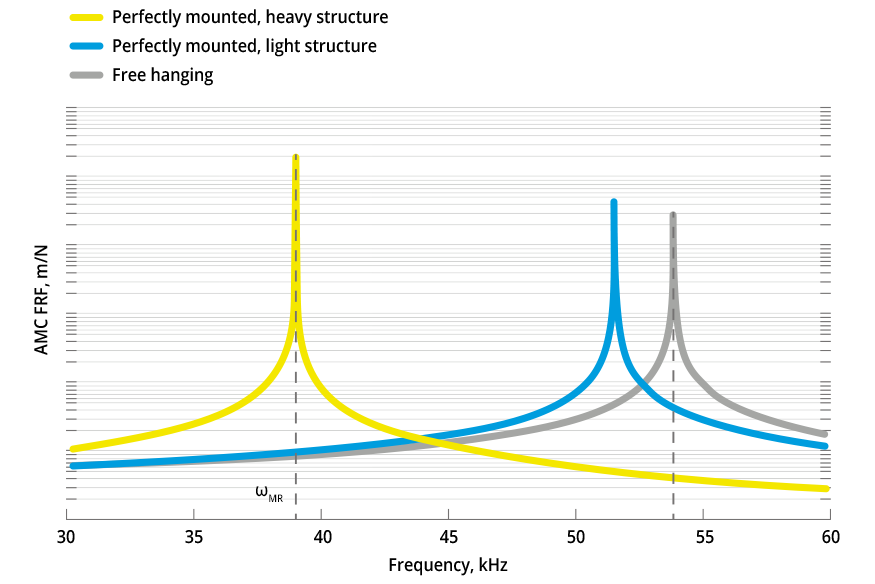
Abb. 2: AMC-Frequenzgangfunktionen
Analysieren der montierten Resonanzfrequenz
Im Diagramm wird die AMC-Übertragungsfunktion (gelbe Kurve) aufgezeichnet, wenn der Beschleunigungssensor perfekt auf einem unendlich schweren Objekt montiert ist (kM → ∞, mt → ∞). Die Übertragungsfunktion weist eine Spitze bei der montierten Resonanzfrequenz ωMR2 = kPZ/ms auf. Die graue Kurve stellt die Übertragungsfunktion des frei hängenden Beschleunigungssensors dar (kM → 0) und weist eine Spitze bei ωFH2 = kPZ (mb + ms) / (ms mb) auf. Für einen typischen Beschleunigungssensor gilt mb ≈ ms und ωFH ≈ √2 ωMR, [Ref. 2].Vor dem Initiieren des AMC ist sicherzustellen, dass der Beschleunigungssensor ordnungsgemäß an der Struktur montiert ist. Ist der AMC initiiert, sucht er den Wert der montierten Resonanzfrequenz in der Aufnehmerdatenbank und erzeugt eine Gleitsinusanregung im Bereich um ωMR (weißer Bereich).
Die gemessene AMC-Übertragungsfunktion, die nahe an der gelben Kurve liegen sollte, wird als Referenz gespeichert. Gelegentlich wird der Vorgang wiederholt und die neu gemessene AMC-Übertragungsfunktion wird mit der Referenzkurve verglichen.
Wenn während des Tests ein Beschleunigungssensor von der Struktur herunterfällt, wird seine AMC-Übertragungsfunktion eher wie die graue Kurve aussehen, die dem frei hängenden Beschleunigungssensor entspricht. Der Algorithmus erkennt, wenn sich die beiden Kurven im weißen Bereich signifikant unterscheiden und fordert den Benutzer auf, den Beschleunigungssensor auf korrekte Montage zu überprüfen.
Ist der Beschleunigungssensor an einer Struktur aus leichtem Material montiert, kann die Referenz-AMC-Übertragungsfunktion wie die blaue Kurve aussehen (kM → ∞, mt klein). Innerhalb des weißen Bereichs ist es fast unmöglich, ihn von der AMC-Übertragungsfunktion des frei hängenden Beschleunigungssensors zu unterscheiden – und somit kann der Accelerometer Mounting Check (AMC) fehlschlagen.
Um dies zu verhindern, führt die BK Connect™-Software einen Vorabprüfungs-Assistenten ein, der solche Situationen erkennt.
Vorteile des Accelerometer Mounting Check (AMC)
- Vermeiden wiederholter Messungen aufgrund loser Aufnehmer
- Erhebliche Zeitersparnis bei der Überprüfung der Aufnehmer auf korrekte Montage
- Erhöhtes Vertrauen in Ihre Datenqualität
Darüber hinaus überprüft der Accelerometer Mounting Check (AMC) automatisch, ob die Beschleunigungssensoren funktionieren und ob es Veränderungen hinsichtlich der Montage gibt:
- Die Funktion ist in allen neuen S-Typ-CCLD-Beschleunigungssensoren von Brüel & Kjær integriert.
- Alle Ladungs-Beschleunigungssensoren werden bei der Verwendung mit LAN-XI-Modulen unterstützt.
So funktioniert der Accelerometer Mounting Check (AMC)
DER ACCELEROMETER MOUNTING CHECK IST ANWENDBAR MIT:
Quellenangabe: [1] Ewins, D.E. 2000. „Modal Testing: Theory, Practice and Application“, Research Studies Press Ltd., Baldock, England [2] Serridge, M., Licht, T.R. 1987. „Piezoelectric Accelerometers and Vibration Preamplifiers“, Brüel & Kjær Publications, Dänemark
Abonnieren Sie unseren Newsletter zum Thema Schall und Schwingung
Die aktuellsten Neuigkeiten von Brüel & Kjær direkt in Ihren Posteingang
Neue Produktfreigaben, Rabatte und Sonderangebote
Artikel, Videos und Anleitungen zum Thema Schall und Schwingung